Our lab focuses on novel theories and applications of robotic systems, especially multi-robot systems. We are interested in next-generation robotic systems that are interesting, meaningful, and challenging to study.
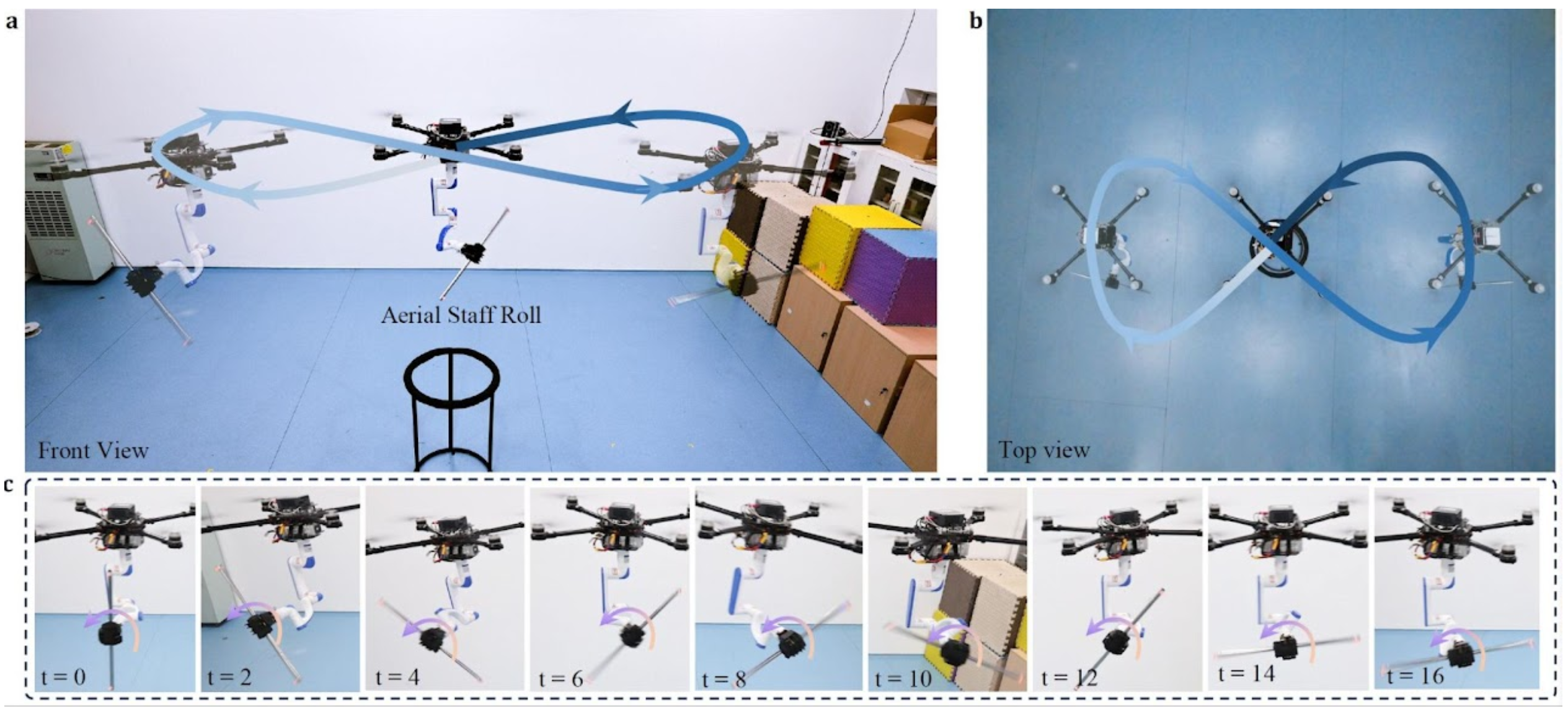
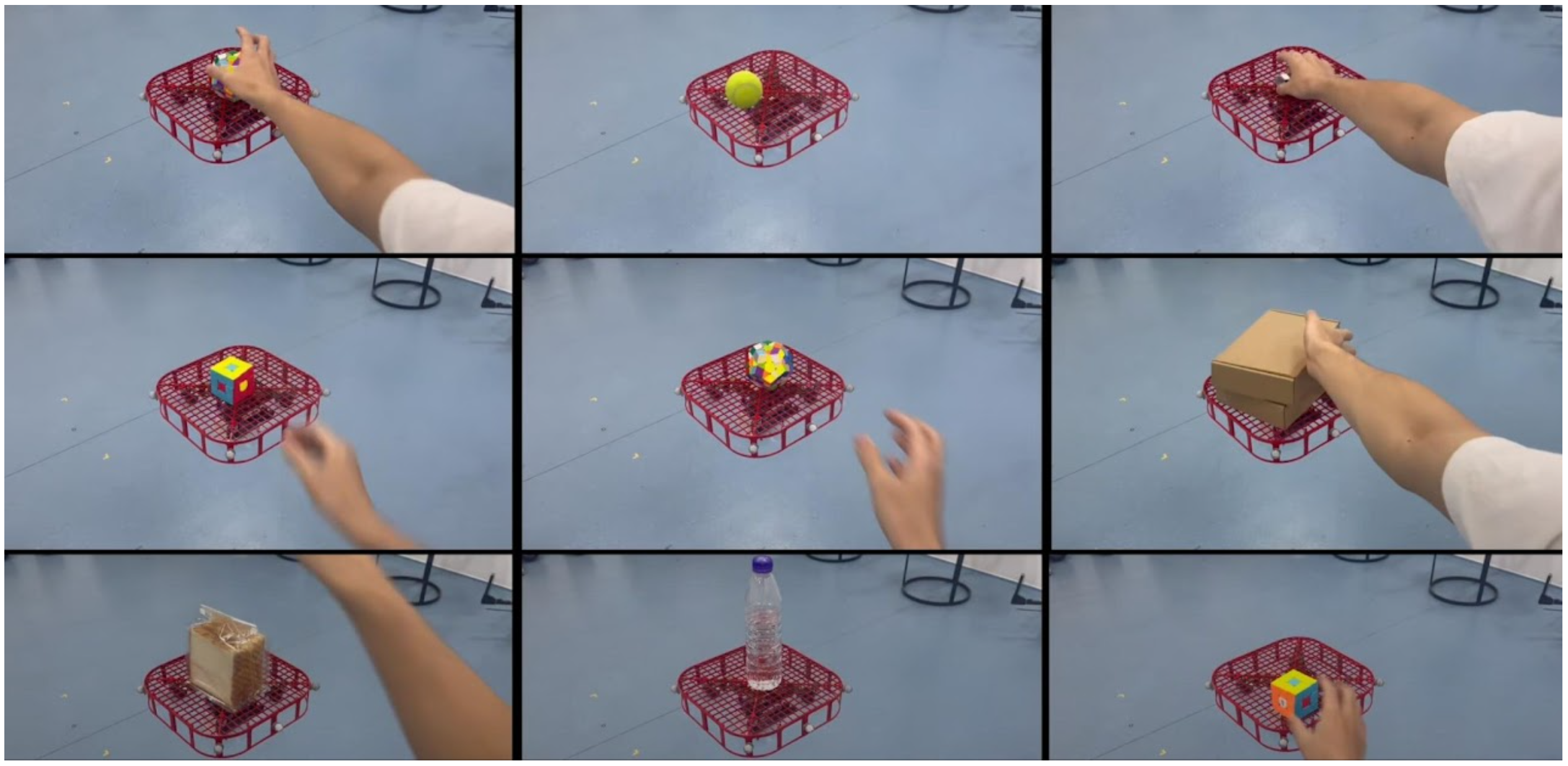
While most current micro aerial vehicles (MAVs) are primarily used for “see”—sensing the environment—we are more interested in using MAVs to “do”, which is to interact with the environment through robotic manipulation. We have been studying aerial robotic manipulation systems that integrate multirotor MAVs with high-degree-of-freedom robotic arms to create systems that operate dynamically across large workspaces while performing precise tasks. Our research spans novel control, estimation, and sensing algorithms, supported by the development of prototype platforms that bring these concepts to reality (see examples below).


Multi-robot systems
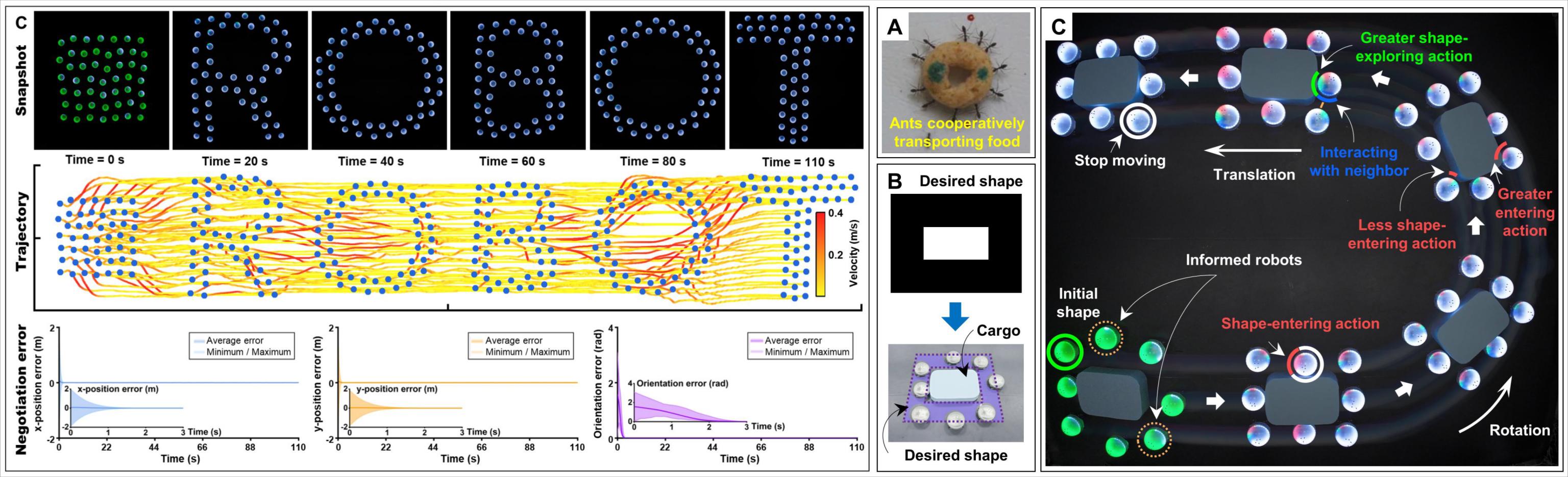
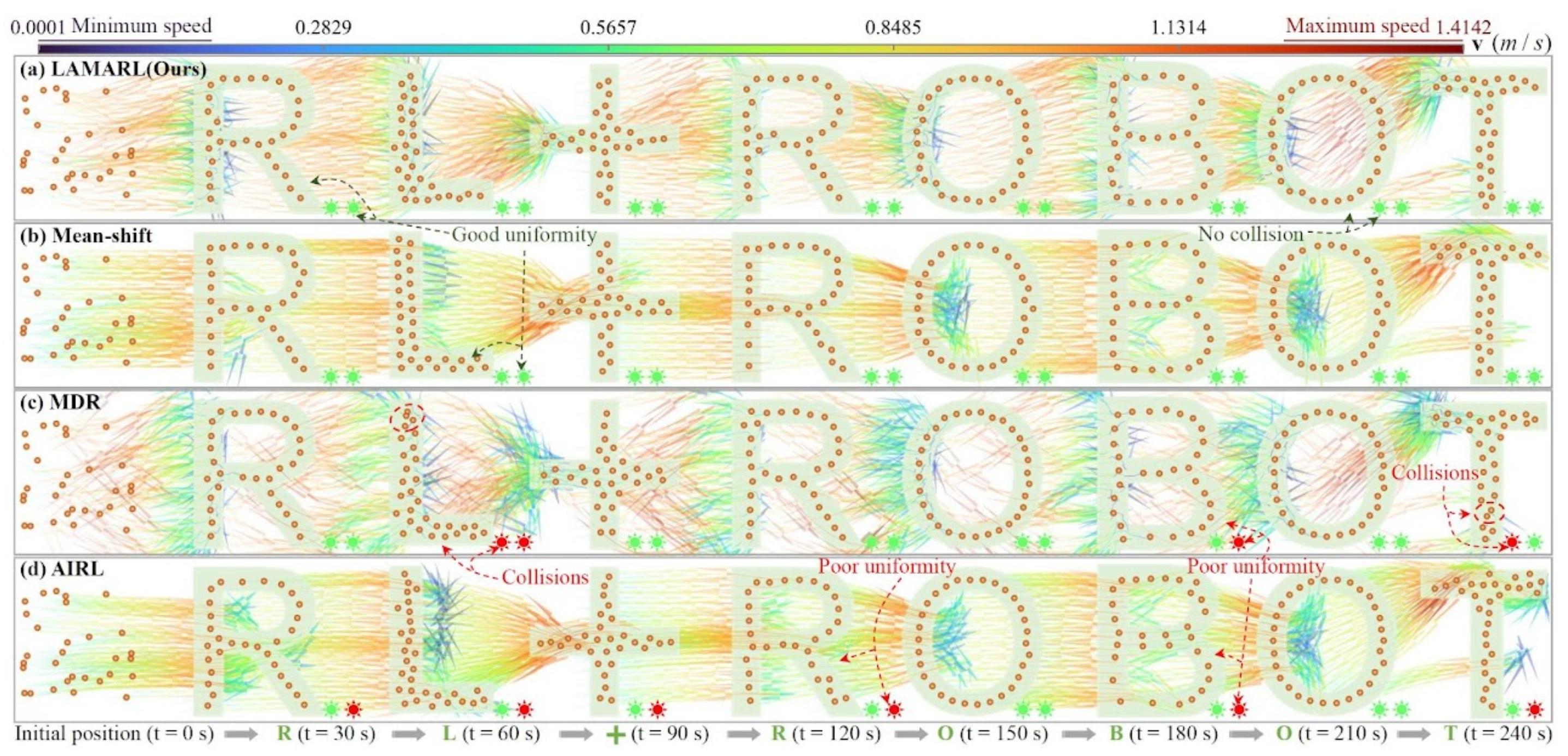
Nature offers numerous examples of collective intelligence—such as bird flocks and fish schools—where sophisticated group behaviors arise from local interactions. Drawing inspiration from these phenomena, we study multi-robot systems that collaborate to enhance operational efficiency and accomplish tasks beyond the capability of individual robots. Our work spans high-level planning and low-level control for multi-robot teams. Beyond algorithmic development, we also construct real-world multi-robot platforms, both ground and aerial, to tackle challenging practical problems (see examples below).

This website was last updated in May 2026
©2019 Intelligent Unmanned Systems Laboratory 浙ICP备18025489号