5月19日,荷兰埃因霍温大学的孙志勇教授和Sofie Haesaert教授应邀来校参观了智能无人系统实验室,并给实验室师生带来了一场精彩的专题学术讲座。孙教授的研究领域广泛而深入,主要关注于多机器人系统、自主编队控制、分布式控制和优化。他在这些领域的专业知识和经验给我们提供了宝贵的学术启发。与此同时,Sofie Haesaert教授的研究专注于网络物理系统的可验证设计,她运用数据驱动建模、控制工程和形式验证等方法,为我们呈现了一种全新的设计思路,让我们深刻认识到在实践中确保系统的可靠性和安全性的重要性。
图1 赵老师作讲座开场介绍 图2 Sofie教授介绍个人的研究工作
在这次讲座中,孙教授向我们生动地介绍了关于存在运动约束的多智能体系统。相比于粒子模型,这些异构运动的智能体具有不同的动力学和运动学方程,这给控制问题的求解带来了更多的时间和空间约束。孙教授提出的基于伪线性约束方程的方法,可以更好地数学化地表示约束,并在有限的时间内找到可行解。Sofie教授着重于用逻辑模型描述上层的任务规划,并通过在逻辑层面的分析实现了在实际场景中的任务规划,并在仿真任务中展现了良好的性能。她的研究在任务规划方面取得了显著的成果,她利用逻辑模型的优势,能够更准确地描述和解决复杂的任务规划问题。

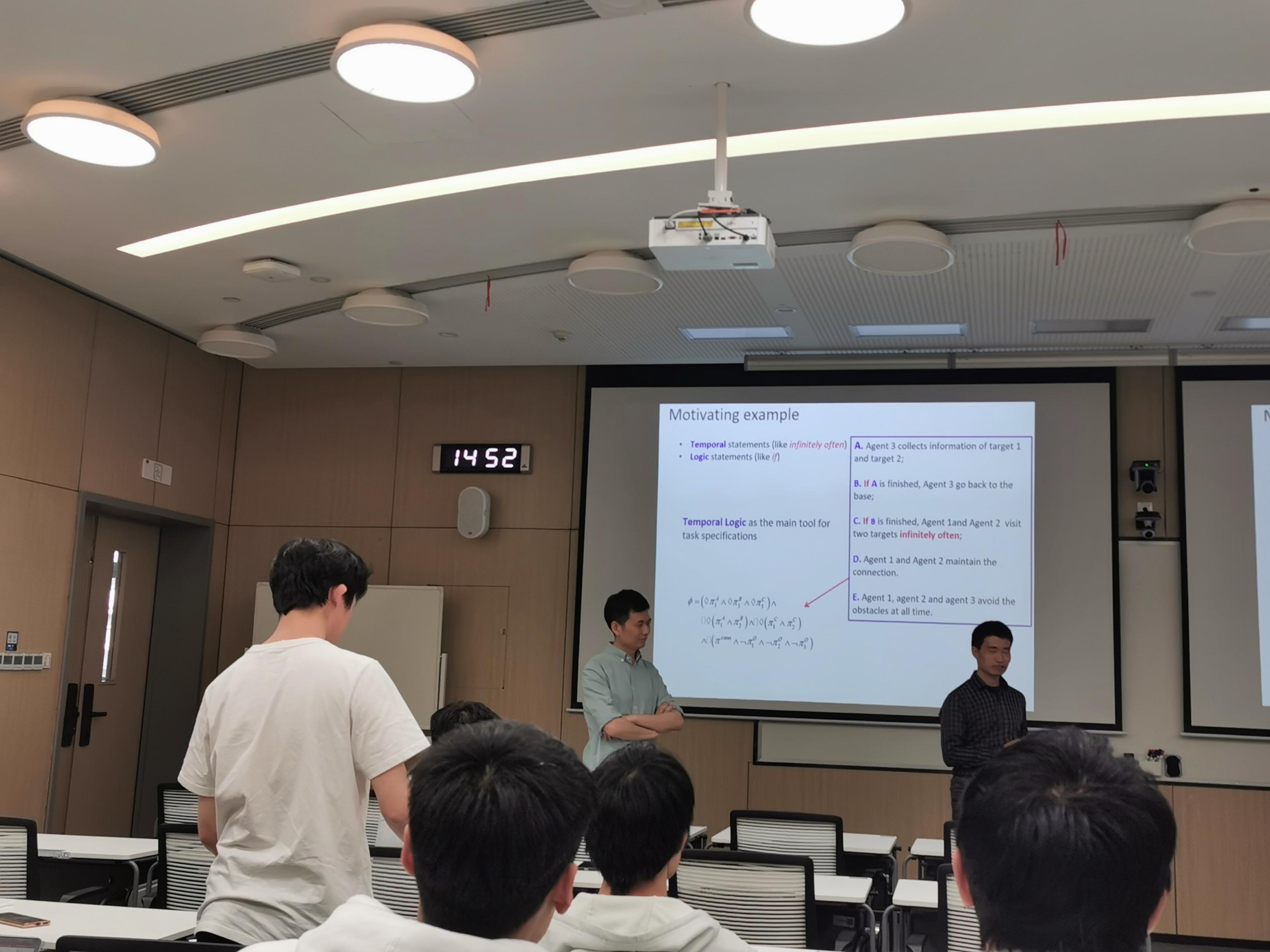
图3 米同学正在进行学术交流讨论 图4 郑同学正在进行学术交流讨论
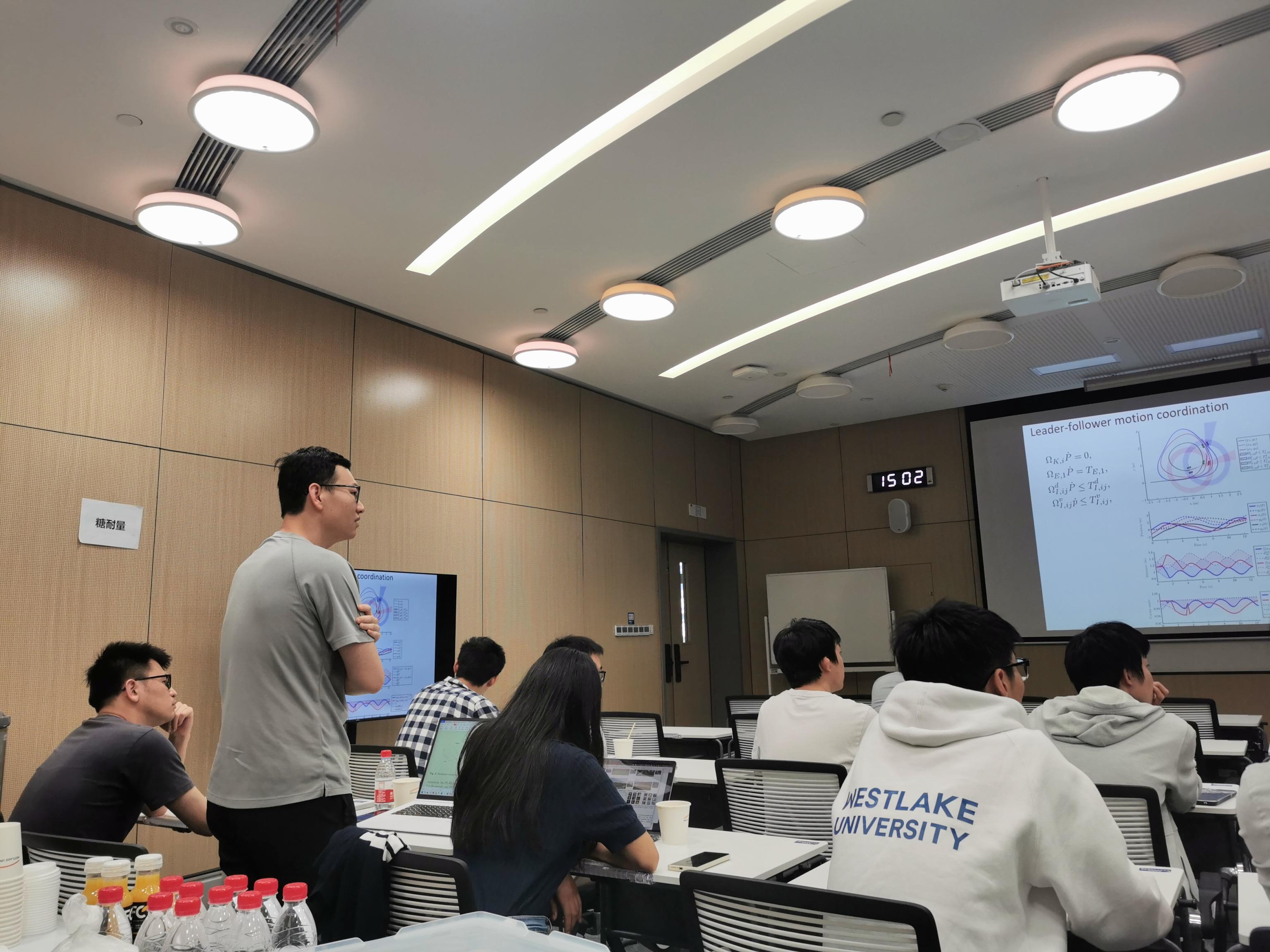
图5 宁同学正在进行学术交流讨论 图6 张同学正在进行学术交流讨论

图7 李同学正在进行学术交流讨论
通过与两位教授的互动和讨论,我们不仅扩展了自己的专业知识,还汲取了宝贵的学术经验。这次交流不仅加深了我们对智能无人系统领域的理解,也为我们未来的研究和创新工作提供了新的思路和方向。我们由衷感谢孙志勇教授和Sofie Haesaert教授的到访,并期待未来更多的学术交流和合作机会。
讲座信息:

Biography:
Zhiyong Sun received the Ph.D. degree from The Australian National University (ANU), Canberra ACT, Australia, in February 2017. He worked as a Research Fellow/Lecturer at ANU of Australia, and then a Postdoc Fellow at Lund University of Sweden. He has won the Springer Best PhD Thesis Award, and several best paper and student paper awards from CDC, AuCC, ICRA and CCTA. Since January 2020 he joined Eindhoven University of Technology (TU Eindhoven), the Netherlands, as an assistant professor. His research interests include multi-robotic systems, control of autonomous formations, distributed control and optimization.
Sofie Haesaert received the Ph.D. degree in 2017 from TU Eindhoven and she did a postdoc at California Institute of Technology (Caltech). In 2017, she won the best PhD Thesis Award of the Dutch Institute of Systems and Control. She started as assistant professor at TU Eindhoven in 2018. Her research work specializes in the verifiable design of cyber-physical systems using data-driven modelling, control engineering, and formal verification.
Abstract:
This talk will review recent research work of autonomous systems and motion control at the Autonomous Motion Control (AMC) lab at TU Eindhoven. We then focus on constrained motion control of muti-vehicle systems, while we aim to address various heterogenous motion constrains arising from many practical vehicle systems with different kinematics/dynamics motion equations. Lastly, we discuss emerging research topics on multi-vehicle formation control with spatio-temporal constraints.
Time: 13:30-15:00, Friday, May 19, 2023
Venue: E10-205, Yungu Campus
Host: Dr. Shiyu Zhao, PI of School of Engineering
Language: English